We discussed some of the properties of vectors toward the beginning of your first semester course in physics. We stated that quantities can be either scalars or vectors, where a vector quantity has two partsa positive scalar part called the magnitude and an important second part, its direction. It is the direction part of a vector that causes all of the headaches involved with components, inverse-tangents, and the like. We also talked about adding and subtracting vectors, both graphically and by components.
We now wish to discuss one of two important ways to multiply two vectors. One way of multiplying two vectors gives us an answer that is a scalar; this type of vector multiplication is called a dot product. (We will not discuss the dot product here.) The second type of vector multiplication gives us an answer that is itself a vector and is called a cross product. We shall discuss the second of these two methods here.
Lets consider two vectors A and B, as shown in the diagram below. We assume that we either know the values of the magnitudes of A and B, or else we know the components, A = (Ax,Ay,Az) and B = (Bx,By,Bz) from which we can compute the magnitudes:
We also assume that we know the value of the angle q between the two vectors (where q is always the angle less than or equal to 180o drawn from one vector to the other).
also assume that we know the value of the angle q between the two vectors (where q is always the angle less than or equal to 180o drawn from one vector to the other).
(Note that as always in these web pages, vectors are denoted within text with a bold symbol, whereas the more proper vector notation (and the notation that you should use when writing vectors!) of a symbol with an arrow above it will be used in separate equations or figures outside of the main text. This is a result of the limitations of software currently being used to produce these web pages....)
The cross product of the two vectors A and B is also a vector. This means that the result of a cross product must have both a magnitude and a direction. We will discuss these two parts of the cross product separately.
The notation for the cross product of two vectors is as follows:
We have called the result of this cross product the vector R, just to give it a name. Note that the cross product is written as the first vector and the second vector with a cross (like a multiplication sign) between them. This is (of course) where the cross product gets its name.
We will now discuss finding the magnitude and direction of the cross product of two vectors.
Magnitude
Finding the magnitude of the cross product of two vectors is an easy matter. It is simply equal to the magnitude of the first vector, times the magnitude of the second vector, times the sine of the angle between the two vectors:
The units of the magnitude R must be equal to the units of A times the units of B. (Trigonometric functions can have no units.) Note that if the two vectors A and B are parallel (q = 0o) or anti-parallel (q = 180o) then the cross product is equal to zero (since sin(0o) = sin(180o) = 0).
Direction
Finding the direction of the cross product can sometimes be a bit tricky and confusing. We first note that any two non-collinear vectors define a plane. (By this we simply mean that, if you imagine two vectors that are not parallel or anti-parallel, then you can imagine placing a flat piece of cardboard on top of them such that it rests flat on both vectors. The piece of cardboard then represents the plane defined by the two vectors.)
The direction of the cross product of two vectors is always perpendicular to the plane defined by the two vectors.
Since there are only two ways to have a vector perpendicular to a plane (in or out, or up or down, etc.), we only need a rule to tell us which of these two possible directions is the right one for the cross product. This rule is called the right-hand rule for cross products (or simply the right-hand rule, or, even more simply, the RHR).
The RHR can be stated as follows:
The Right-Hand Rule for Cross Products
1. Extend the fingers and thumb of your right hand straight out.
 |
2. Orient your hand so that your thumb points toward the direction of the first vector in the cross product (A) and your fingers point in the direction of the second vector (B). (Note that your fingers, thumb and palm should all be flat in the same planethat is, they would all lie flat on a piece of cardboard if it were placed on them.)
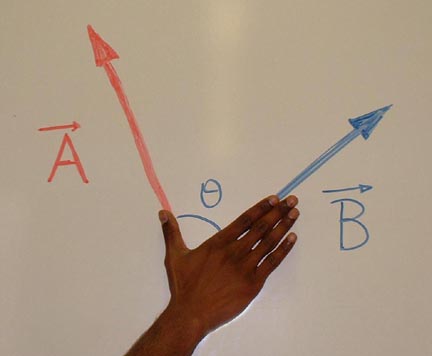 |
3. With your hand in this orientation, your palm points in the direction of the cross product of the two vectors (R).
 |
To (hopefully) make this a bit more clear, lets look at a couple of examples of finding the cross product.
Example A
Consider the two vectors
with angle q = 94.8o between them. Find the vector S , defined to be the cross product of A and B:
The magnitudes of the vectors A and B are computed as follows:
and
Finding the magnitude of the vector S is then easy:
Remember the symbols for denoting a vector pointing directly out of or directly into the screen (or piece of paper, etc.):
![]() vector pointing directly out (this represents the tip of an arrow pointing out towards you)
vector pointing directly out (this represents the tip of an arrow pointing out towards you)
![]() vector pointing directly in (this represents the tail-feathers of the arrow pointing out towards you as the arrow is heading inwards)
vector pointing directly in (this represents the tail-feathers of the arrow pointing out towards you as the arrow is heading inwards)
With this in mind, the picture below shows applying the RHR to find the direction of the vector S.
 |
We thus have the result that the vector S points directly out, so we can write
Before moving on to the next example, we first note a very important property of the cross productnamely that the order of the two vectors in the cross product matters (unlike in regular multiplication). In particular, if we define the vector V such that
then the magnitude of V is
the same as the magnitude found previously for S, but the direction of V is found to be into the screen, so that
as shown in the picture below.
 |
It thus follows that
Example B
The position vector r and velocity vector v of an object of mass m = 2.5 kg are found to be equal to
with angle q = 47.8o being the angle between them. The angular momentum vector L is defined to be
Find the value of the objects angular momentum.
We first find the magnitudes:
and
It then follows that (watch the units!)
The direction of the cross product in the equation for the angular momentum L is then found from the RHR to point directly out of the x-y plane (in the positive-z direction), as shown below:
 |
Since the mass is a positive quantity, multiplying the result of the cross product by the mass to find the angular momentum vector L does not change the direction of the vector. Thus, the objects angular momentum is equal to